
 ORB_SLAM2原理、代码流程文档
ORB_SLAM2原理、代码流程文档
# 算法原理
算法由三大部分组成,分别是 Tracking、LocalMapping、LoopClosing 三个线程
# Tracking
特征点的提取(ORB Extraction) 在此之前,特征点的提取方法有sift,surf等,但相比ORB都比较耗时。ORB算法先提取FAST角点,再计算BRIEF描述子,最终利用Bow词袋模型来匹配特征点。
建立图像金字塔:将原图像按不同比例缩小,得到多张图片,分别对每张图片进行下述操作。
FAST角点提取(对所有像素点进行提取)
- 将图像转为灰度图,选取像素
, 假设他的亮度为 - 设定一个阈值
,其大小与 成正比 - 以
为中心,半径为3的圆上选16个像素点 - 如果有连续
个点亮度大于 或小于 ,则 被认为是一个FAST角点 
- 将图像转为灰度图,选取像素
- BRIEF描述子(对所有的FAST角点计算描述子)
计算每个FAST角点圆心到质心点的方向
将每个角点对应的圆域进行旋转,旋转至所有角点对应的方向相同。 
圆域内选取N个点对(默认指定了128对点),通过将亮度的比较结果,将角点映射为:只由0、1组成的128维向量,将此向量作为BRIEF描述子
最后,对每个FAST角点,都生成了128维描述子。
当被拍摄物体放大或者缩小时,FAST角点会产生不同的提取结果(比如缩小会引起角点消失),但在图像金字塔的其他层中依然可以提取到缩放前对应的FAST角点,从而具有良好的尺度不变性。当被拍摄物体发生旋转时,其FAST角点的方向也会随之旋转,计算BRIEF描述子前,将所有FAST角点旋转至同一方向,相当于将所有拍摄对象都旋转到同一方向,从而具有良好的旋转不变性
- BoW 词袋模型(对图片、特征进行查找和索引)
- 词袋模型作为所有描述子的字典, 用于量化两张图或两个特征点的相似性
- 字典的数据结构为 k叉树,上层是下层的聚类,最底层的每个叶子节点对应的是最小特征单元:BRIEF描述子

- 获得描述子后,通过次查找k叉树,来得到此描述子的匹配点,降低了查找匹配的复杂度
旋转不变性来自:提取FAST特征时,计算了每个角点的中心点到质心点的方向向量,即使物体发生了旋转,也可利用方向向量来识别。
尺度不变性来自:对每一帧,建立4层的高斯金字塔,分别在每层金字塔上做特征提取,即使A图中的特征在B图中变小,也可以在A图金字塔高层提取到B图中同尺度的特征
点云初始化 这部分在论文中没有提及。发生在整个算法刚开始运行时,点云的初始化是此后每一帧能成功定位的前提
- 作用:特征匹配、三角化,得到初始点云图,对于单目来说,就是将P2P问题转为PnP问题
- 步骤(以单目为例):
- 初始选取2个特征点较多的帧(
),并在词袋中进行特征匹配 - 并行计算单应性矩阵
和基础矩阵 。 当对极约束不成立的时候(相机只有旋转没有平移),或场景都在同一平面时,用单应性矩阵来计算两帧之间的变换矩阵。否则用基础矩阵计算变换矩阵 - 将第一帧的位姿设置为基准位姿,第二帧的位姿为上一步所求出的变换矩阵
- 创建地图点对象MapPoint,恢复出所有匹配点对应的世界坐标

- 初始选取2个特征点较多的帧(
位姿初始化(Initial Pose Estimation) 对
(此刻的帧)位姿优化之前,先要有一个大概的估计,作为之后优化位姿的初值。根据当前跟踪状态的不同,一共有三种初始化方法:根据参考关键帧估计,根据匀速运动模型估计,重定位。除此之外,还要对此帧观测到的特征点进行估计 - 作用:估计帧的位置,以及观测到的局部地图点
- 步骤:
跟踪状态为LOST时:
- 用重定位估计位姿(Relocation),用词袋模型寻找与
最相似的帧 ,进行特征匹配 - 统计
上匹配点数量,数量太少则认为匹配效果差,保持状态为LOST,结束对此帧的处理,等待下一帧;数量足够的话,进行一次仅优化位姿的BA(motion-only BA),数量不够则舍弃此帧
- 用重定位估计位姿(Relocation),用词袋模型寻找与
跟踪状态NORMAL时:
- 根据匀速运动模型估计位姿,默认上一帧到
的变换矩阵等于上上帧到上一帧的变换矩阵。(track with Motion model) 
- 将上一帧(LastFrame)观测到的MapPoint 投影到估计的位姿上,观测有多少投影点与特征点位置重合,重合则认为是一对匹配点,如果重合的足够多,则进行一次仅优化位姿的BA,如果重合的个数太少,表明匹配失败改用参考关键帧估计;

- 根据匀速运动模型估计位姿,默认上一帧到
根据参考关键帧估计位姿:(Track with RefFrame)
- 用词袋模型,将
与参考关键帧(最新的关键帧)进行特征匹配 - 匹配后执行一次仅优化位姿的BA(motion-only BA)

- 统计匹配特征点数,数量少则认为匹配失败,将状态改为LOST,结束对此帧的处理,等待下一帧;
- 用词袋模型,将
- 需要注意:初始化后的
中仍会有大量特征点没建立匹配 ,这也体现了tracking线程的重要思想:在尽可能少的建立匹配的情况下,初始化出相机的位姿。
局部位姿优化(Track Local Map) 经过上面的初始化,失败的
,说明其与地图联系不够紧密,无法建立稳健的约束和估计;而与地图联系紧密的 则初始化成功。 但刚刚初始化所得位姿仅依赖于与某一帧(前一帧或参考关键帧)中的匹配关系,置信度较低。 接下来,我们在局部图中寻找更多的匹配关系,利用这些匹配关系进一步优化 的位姿。 - covisibility graph定义:covisibility graph,是无向加权图,如果两个关键帧之间有共视关系(共同观测到>15个地图点)就连成一条有权边,这些边和所有关键帧节点组成共视图。
- 在共视图中,针对
定义一组关键帧为局部关键帧,局部关键帧由四种邻居组成。这四种邻居为: - 与
有共视点的帧(一级共视帧) - 与 一级共视帧 有共视点的前十个帧(二级共视帧)(按共视点个数排序)
- 一级共视帧的子关键帧
- 一级共视帧的父关键帧(与一级共视帧共视程度最高的帧)
- 与
- 将
、局部关键帧 、以及这些帧观测到的 MapPoint作为:局部图 ( ) - 将
中的MapPoint向 投影 - 对
再进行一次仅位姿BA(motion-only BA)优化,估计出各个局部关键帧的位姿
关键帧的审核与生成 (New Keyframe Decision)
- 检测系统是否允许关键帧的插入
- only_Tracking 模式下,不需要关键帧
被 loopclosing线程占用,不能插入关键帧 - 关键帧总数较多,且距离上一个关键帧距离很近,不需要插入关键帧
- 审核
是否有资格做关键帧 - 记录
观察到的MapPoint总数, - 记录
观察到的MapPoint总数,  - 如果
小于一定阈值,则允许 作为一个关键帧
- 记录
- 将
设置为关键帧 - 将自己生成的关键帧
作为 的参考关键帧 - 在地图中新建地图点 
- 将自己生成的关键帧
- 检测系统是否允许关键帧的插入
- 总结
- Tracking线程根据状态的不同,以三种方式来初始化每一帧的位置和姿态,这三种方式速度由慢到快为:

- 回顾Tracking过程
- 整个过程可以看做三步:获取位置、优化位置、关键帧审核
- 在尽可能少建立匹配或者不建立匹配的情况下,进行位姿初始化(
获取位置) - 尽可能建立一个:体量尽量小、但与
关系足够多(四种邻居)的局部图,在此局部图的基础上进行图优化BA ( 优化位置) - 在跟踪到的点足够多的情况下(>50个),尽可能多地生成关键帧,因为后面的关键帧删除策略很严格,这里关键帧的生成比较宽松(
关键帧审核)
- 可以看出,Tracking的一个重要特点是提速(不到万不得已,不进行耗时的匹配操作)
# LocalMapping
当待处理
队列非空, localMapping线程就开始工作、 将此KeyFrame插入共视图中(KeyFrame Insertion)
- 计算此KeyFrame对应的词袋向量(应该是在回环检测会用到)
- 获取localMap中,被此KeyFrame观测到的点(在Tracking线程中的位姿初始化步骤已经被初始化),更新此KeyFrame的平均观测方向,以及各个MapPoint的最佳描述子
- 根据共视程度创建有权边,将KeyFrame插入共视图中
- 删除多余的MapPoint
此前LocalMapping线程可能删除了一些冗余关键帧,导致对应的地图点接近于“无帧观测”的状态,不满足以下2条件中任意一条的MapPoint会被移除
- 对于localmap中的任意地图点
,如果 >25% - 如果观测到
的是一个关键帧,则至少三个连续关键帧都观测到
- 对于localmap中的任意地图点
- 创建新的MapPoint
- 创建MapPoint点:对当前关键帧(
)的未匹配特征点,在所有其他关键帧中寻找特征匹配(利用词袋模型),得一定数量的最佳共视关键帧( ),相互匹配后进行三角化,计算出新 的位置 - 构建MapPoint、
与全局map的联系:得出MapPoint的位置后,还需要将 与全局map融合,也就是建立 与其他关键帧的联系 - 定义一级二级关键帧:
- 一级关键帧:在共视图中挑选10个共视程度最佳的邻居
- 二级关键帧:对每个一级关键帧,分别挑选5个共视程度最高的邻居
- 正向投影融合:此时
点只被 和 两个帧所观测到,还需将 分别投影到一、二级关键帧,观察是否与其他关键帧中的特征点匹配  投影至一、二级关键帧上后,如果投影点恰好与某个特征点重合,会有两种情况
投影至一、二级关键帧上后,如果投影点恰好与某个特征点重合,会有两种情况
- 特征点没有对应的MapPoint: 设置
为此特征点对应的MapPoint - 特征点有对应的MapPoint
:删除 其中之一,即被观测帧数最少的 - 此时当前帧
的所有地图点已与localmap融合、建立联系;
- 特征点没有对应的MapPoint: 设置
- 反向投影融合:将一、二级关键帧观测的特征点投影到
,投影后同样会有两种情况,处理方式同上 - 至此,当前帧
的所有地图点已与全局map融合;一、二级关键帧观测的特征点也与 建立匹配关系
- 定义一级二级关键帧:
- 创建MapPoint点:对当前关键帧(
- 进行全局BA优化,优化所有的
、所有的
- 删除冗余的关键帧
为了防止关键帧数量无上限增长,需要不停检测冗余的关键帧,如果
中 90%的点已经在其他帧中被观测到,就将冗余关键帧 删除,方法如下: - 首先遍历共视图中的邻居
,再遍历 的每个MapPoint ( i=0,1,...n) - 记录被观测数大于3的
,如果此类 占所有 超过90% ,就将 删除。
- 首先遍历共视图中的邻居
# LoopClosing
# ① 检测闭环
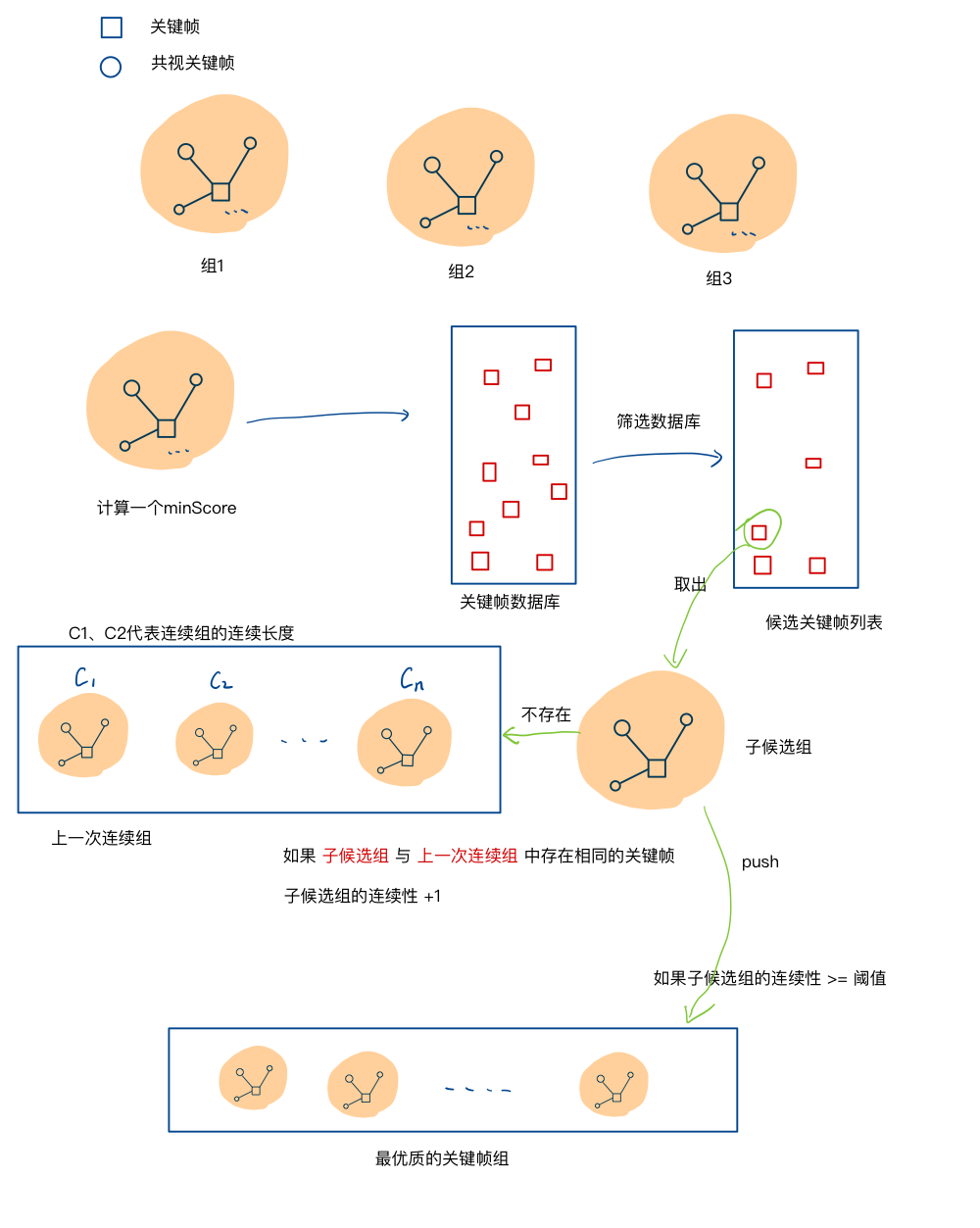
关键帧 与 其 共视帧 组成一个候选关键帧组 , 不同候选关键帧组中有相同的关键帧,则称这两个组是连续的。
- 从队列头中取出一个关键帧, 作为当前检测闭环的关键帧;
- 如果距离上次闭环没过多久, 或者map中关键帧总共还没有10帧, 则不进行闭环检测;
- 计算这个关键帧与它所有的共视帧的Bow相似度得分, 得到最低得分minScore;
- 计算这个关键帧与关键帧数据库中所有帧的相似度得分, 将得分大于minScore的作为候选关键帧,放入候选关键帧组 列表中;
- 在候选关键帧中检测具有连续性 > 3 的候选帧;
- 将满足要求的关键帧存放在列表 mvpEnoughConsistentCandidates 中(最优质关键帧组)。
# ② 计算sim3 相似变换
- 遍历上一步得到的每一个闭环候选关键帧;
- 通过Bow加速得到 闭环候选关键帧 与 当前关键帧 之间的匹配点;
- 如果匹配点个数 小于 20, 则剔除该 闭环候选关键帧;
- 计算闭环候选关键帧 与 当前关键帧 之间的 Sim3 变换;
- 通过RANSAC 算法迭代五次,求出候选帧到当前关键帧的Sim3变换Scm;
- 通过Sim3变换把候选帧的特征点变换到当前关键帧中,反之同理,求出相互匹配的特征点;
- 再通过上一步 求出的特征点,通过g2o来优化刚刚的Scm,得到mg2oScw;算出一个好的,为mpMatchedKF,就退出循环;
- 将上面能算的好的mpMatchedKF,将其与其共视关键帧都放入列表vpLoopConnectedKFs中,它们对应的地图点放入列表mvpLoopMapPoints中;
- 再将mvpLoopMapPoints中的地图点,通过Sim3变换投影到当前关键帧,搜索更多的匹配对;
- 如果匹配对超过40,回环成功。最终的形成回环的帧是mpMatchedKF。
# ③ 回环矫正
- 需要请求局部地图停止,防止它向缓冲区插入新的关键帧。
- 因为,步骤四中的6,将当前关键帧通过一次Sim3变换一次,所以需要对当前关键帧通过共视关系更新它的连接关系;
- 遍历当前关键帧组,通过关键帧和共视帧的对应关系,很容易求出共视帧的Sim3变换,当前关键帧到其共视帧的Sim3变换g2oSic * mg2oScw,将这个通过g2o优化好的Sim3变换存入到列表CorrectedSim3中。与直接求出这一帧的相机坐标系位姿GetPose()变换,转换成Sim变换,存入到列表NonCorrectedSim3中;
- 遍历当前关键帧的共视关键帧,修正这些共视关键帧的地图点。变换关系:这个点的世界坐标系 --(NonCorrectedSim3中的变换)--> 未矫正的相机坐标系 --(CorrectedSim3中的逆变换)--> 矫正后的世界坐标系。将这个共视关键帧的位姿设置为CorrectedSim3中的变换;
- 检查当前帧地图点与经过闭环匹配后该帧的地图点是否存在冲突,对冲突进行替换或者填补。同时遍历匹配点和当前关键帧的地图点,如果当前关键帧地图点存在,那么就用匹配点代替,否则就把匹配点添加到当前关键帧地图点;
- 同理,将闭环关键帧组的地图点,投影到当前关键帧组地图点进行匹配,融合,新增或者替换;
- 更新当前关键帧组之间的两级共视相连关系;
- 进行本质图优化,优化本质图中所有关键帧的位姿和地图点;
- 新建一个线程用于全局BA优化。
# 代码流程
# 文件的调用关系
主函数只调用了Tracking线程
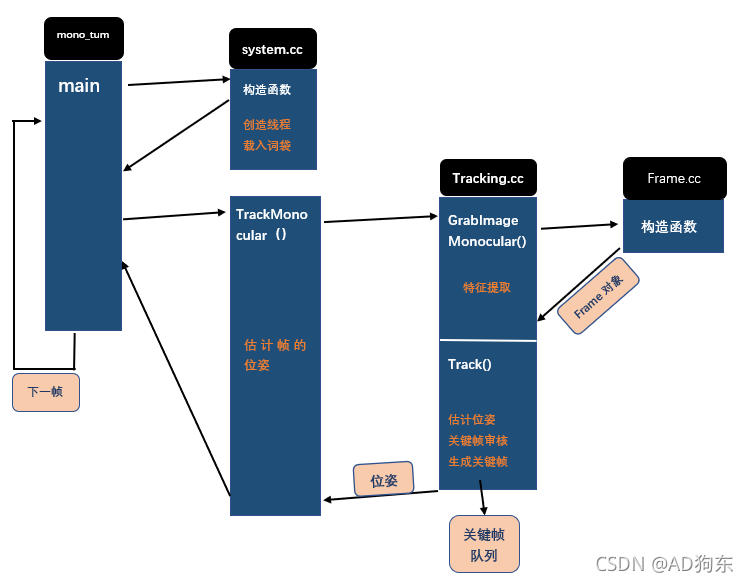 LocalMapping、LoopClosing线程不断查找关键帧队列,如果队列非空,LocalMapping线程开始工作,LoopClosing线程继续检查是否构成回环,如果队列非空且构成回环则LoopClosing开始工作。
LocalMapping、LoopClosing线程不断查找关键帧队列,如果队列非空,LocalMapping线程开始工作,LoopClosing线程继续检查是否构成回环,如果队列非空且构成回环则LoopClosing开始工作。
# 重要变量的意义
| 线程 | 函数名 | 变量名 | 变量类型 | 意义 |
|---|---|---|---|---|
| Tracking | track() | mState | bool | 标志系统状态:未初始化、正常或丢失 |
bOK | bool | 衡量track()中每一步跟踪的质量 | ||
mbOnlyTracking | bool | 标志系统是否处于只跟踪不建图模式 | ||
| CheckReplacedInLastFrame() | mLastFrame | Frame | 当前帧的上一帧 | |
| TrackWithMotionModel() | vpMapPointMatches | vector<MapPoint*> | 上一帧与当前帧的匹配关系 | |
nmatchesMap | int | 记录特征匹配的内点数目 | ||
| TrackReferenceKeyFrame() | vpMapPointMatches | vector<MapPoint*> | 上一帧与当前帧的匹配关系 | |
nmatchesMap | int | 记录特征匹配的内点数目 | ||
| Relocalization() | vpCandidateKFs | vector<KeyFrame*> | 与当前帧最相似的关键帧队列 | |
vvpMapPointMatches | vector<vector<MapPoint*> > | 帧队列中所有帧与当前帧的匹配关系 | ||
nCandidates | int | 质量好的候选帧数量 | ||
bNoMore | bool | 为true表示RANSAC已达到最大迭代次数 | ||
sFound | set<MapPoint*> | 投影到当前帧为内点的MapPoint集合 | ||
| NeedNewKeyFrame() | mpLocalMapper | LocalMapping* | 局部建图线程对象 | |
mpMap | Map* | 全局地图对象 | ||
nKFs | int | 全局地图中的关键帧数 | ||
nMinObs | int | 规定的最小观测次数 | ||
mpReferenceKF | KeyFrame* | 最新的关键帧作为参考关键帧 | ||
nRefMatches | int | 参考关键帧中,被观测次数>nMinObs的地图点数量 | ||
thRefRatio | int | 值越大,越倾向于接受关键帧 | ||
| CreateNewKeyFrame() | pKF | KeyFrame* | 新建的关键帧对象 | |
mpLastKeyFrame | KeyFrame* | 最新的关键帧 | ||
mlNewKeyFrames | list<KeyFrame*> | 存放Tracking产生的关键帧 | ||
| LoopMapping | ProcessNewKeyFrame() | vpMapPointMatches | vector<MapPoint*> | 当前帧对应的所有地图点 |
mlpRecentAddedMapPoints | list<MapPoint*> | 还需被MapCulling检验的地图点列表 | ||
mspKeyFrames | set<KeyFrame*> | 存储全局map中所有的关键帧 | ||
| MapPointCulling() | nThObs | int | 根据相机类型设置不同的观测阈值 | |
mlpRecentAddedMapPoints | list<MapPoint*> | 还需被MapCulling检验的地图点列表 | ||
nCurrentKFid | unsigned long | 当前帧的id | ||
mnFirstKFid | int | 地图点对象的属性,记录创建此地图点的关键帧id | ||
| CreateNewMapPoints() | nn | int | 选取一级共视关键帧的个数 | |
vpNeighKFs | vector<KeyFrame*> | 存放nn个一级共视关键帧 | ||
.......待更新 | ||||
| SearchInNeighbors() | nn | int | 选取一级共视关键帧的个数 | |
vpNeighKFs | vector<KeyFrame*> | 存放nn个一级共视关键帧 | ||
pKFi | KeyFrame* | 一级共视关键帧 | ||
vpSecondNeighKFs | vector<KeyFrame*> | 存放5个二级关键帧 | ||
vpFuseCandidates | vector<MapPoint*> | 一、二级关键帧中,需要与当前帧融合的地图点 | ||
| KeyFrameCulling() | vpLocalKeyFrames | vector<KeyFrame*> | 当前帧的所有一级共视关键帧 | |
vpMapPoints | vector<MapPoint*> | 每个共视关键帧对应的地图点 | ||
nRedundantObservations | int | 记录冗余点的数量 | ||
thObs | int | 规定的最小观测次数 | ||
scaleLevel | int | 关键帧的金字塔尺度,值越大越靠近顶端 | ||
nObs | int | 记录有多少个关键帧高质量地观测到同一个地图点 | ||
nMPs | int | 记录当前帧中非坏点的个数 | ||
| InsertKeyFrame() | mlpLoopKeyFrameQueue | list<KeyFrame*> | 存放LoopClosing产生的关键帧 | |
| LoopClosing | DetectLoop() | mlpLoopKeyFrameQueue | list<KeyFrame*> | 关键帧缓冲队列 |
vpConnectedKeyFrames | vector<KeyFrame *> | 与当前帧相连的共视关键帧 | ||
mpORBVocabulary | ORBVocabulary* mpORBVocabulary | 词袋模型中的大词典 | ||
vpCandidateKFs | vector<KeyFrame *> | 当前帧的候选回环关键帧 | ||
mvConsistentGroups | vector | 上一次产生的连续组 | ||
vCurrentConsistentGroups | vector | 筛选出来的连续组 | ||
ConsistentGroup | pair<set<KeyFrame*>,int> | 连续组结构 | ||
mvpEnoughConsistentCandidates | std::vector<KeyFrame*> | 最优质的闭环候选帧 | ||
| DetectLoopCandidates() | spConnectedKeyFrames | set<KeyFrame*> | 与当前帧相连的关键帧 | |
lKFsSharingWords | list<KeyFrame*> | 可能与当前关键帧形成闭环的候选帧 | ||
mBowVec | map<WordId, WordValue> | WordId 和 WordValue 表示Word在叶子中的id和权重 | ||
mvInvertedFile | vector<list<KeyFrame*> > | vector的下标是WordId,list是包含这个Word的所有关键帧 | ||
lKFsSharingWords | list<KeyFrame *> | 初步候选关键帧列表 | ||
lScoreAndMatch | list<pair<float, KeyFrame *>> | 筛选单词数后的候选关键帧列表 | ||
vpLoopCandidates | vector<KeyFrame *> | 最后返回的关键帧列表 | ||
| UpdateConnections() | KFcounter | map<KeyFrame*,int> | 关键帧 -- 共视程度(地图点个数) | |
vpMP | vector<MapPoint*> | 关键帧的地图点 | ||
observations | map<KeyFrame*,size_t> | 观察到这个地图点的关键帧,size_t表示这个地图点对应在该关键帧的特征点id | ||
| ComputeSim3() | vvpMapPointMatches | vector<vector<MapPoint *>> | 存储每个候选帧的匹配地图点信息 | |
mvpCurrentMatchedPoints | vector<MapPoint*> | 存储的地图点在"当前关键帧"中成功地找到了匹配点的地图点的集合 | ||
| CorrectLoop() | CorrectedSim3 | map<KeyFrame *, Sim3> | 存储的地图点在"当前关键帧"中成功地找到了匹配点的地图点的集合 | |
| NonCorrectedSim3 | map<KeyFrame *, Sim3> | 存放没有矫正的当前关键帧的共视关键帧的世界坐标系下Sim变换 |
# Tracking流程
位姿初始化(截取部分):根据系统状况、跟踪效果选择不同的位姿初始化方法
if(mState==OK){ CheckReplacedInLastFrame(); if(mVelocity.empty() || mCurrentFrame.mnId<mnLastRelocFrameId+2) bOK = TrackReferenceKeyFrame(); else{ bOK = TrackWithMotionModel(); if(!bOK) //根据恒速模型失败,根据参考关键帧来跟踪 bOK = TrackReferenceKeyFrame(); } } else bOK = Relocalization();CheckReplacedInLastFrame() ==更新上一帧中的地图点==
- 检查$CurrFrame$中是否有地图点被LocalMapping线程替换或者删除 - 被替换则更新,被删除则将地图点赋值为NULL
TrackWithMotionModel() ==用匀速运动模型,对
进行位姿初始化== - 默认上一帧到 $CurrFrame$ 的变换矩阵等于上上帧到上一帧的变换矩阵。 - 将上一帧观测到的地图点,投影到$CurrFrame$ ,投影点与特征点的间距作为error,如果匹配点不够,则进行`TrackReferenceKeyFrame()` - 如果匹配点足够,进行一次仅位姿的BA优化,优化$CurrFrame$的pose,使error最小
TrackReferenceKeyFrame() ==用上一帧,对
进行位姿初始化== - 用**词袋模型**,将 $CurrFrame$ 与**参考关键帧**(最新的关键帧)进行特征匹配 - 将 **参考关键帧**的地图点投影到$CurrFrame$ ,投影点与特征点的间距作为error - 如果匹配点足够,进行仅位姿的BA优化,优化$CurrFrame$的pose,使error最小
Relocalization() ==用词袋模型寻找
,对 进行位姿初始化== - 在所有关键帧中,先用词袋模型找出一批,与$CurrFrame$共同单词最多的关键帧,作为候选关键帧`vpCandidateKFs` - 遍历`vpCandidateKFs`,用词袋模型,找出与$CurrFrame$相似度最高的帧作为$RelocFrame$ - 用**词袋模型**,将 $CurrFrame$ 与 **$RelocFrame$** 进行特征匹配 - 将 **$RelocFrame$**的对应地图点投影到$CurrFrame$ 上,投影点与特征点的间距作为error - 如果匹配点足够,进行仅位姿的BA优化,优化$CurrFrame$的pose,使error最小局部位姿优化 、关键帧审核(截取部分)
//更新参考关键帧
mCurrentFrame.mpReferenceKF = mpReferenceKF;
if(!mbOnlyTracking){
if(bOK)
bOK = TrackLocalMap();
}
else
{
if(bOK && !mbVO)
bOK = TrackLocalMap();
}
//更新系统状态、更新显示、 等等
.....
if(NeedNewKeyFrame())
CreateNewKeyFrame();
TrackLocalMap()
==局部地图中,用BA优化
更新局部关键帧、局部地图点,构建局部地图
将局部地图中的
投影到 ,建立新的匹配关系 仅位姿的BA优化
更新
对应的每个 的被观测信息、删除外点
- 根据匹配点数目判断局部位姿优化的好坏,好的话(成功匹配50个点)返回true,否则flase
NeedNewKeyFrame() ==检测系统是否需要插入关键帧==
纯Tracking模式,不生产关键帧
LoopCLosing线程正在使用局部地图时,不生产关键帧
关键帧数目较多、且位置离上一个关键帧较近,不生产关键帧
- 当LocalMapping线程不忙,且
小于一定阈值,则需要生产关键帧,返回true
CreateNewKeyFrame()
将
# LocalMapping流程
函数主体(截取部分)
if(CheckNewKeyFrames())
{
ProcessNewKeyFrame();
MapPointCulling();
CreateNewMapPoints();
if(!CheckNewKeyFrames())
SearchInNeighbors();
mbAbortBA = false;
if(!CheckNewKeyFrames() && !stopRequested())
{
if(mpMap->KeyFramesInMap()>2)
Optimizer::LocalBundleAdjustment(mpCurrentKeyFrame,&mbAbortBA, mpMap);
KeyFrameCulling();
}
mpLoopCloser->InsertKeyFrame(mpCurrentKeyFrame);
}
CheckNewKeyFrames()
==检查关键帧队列mlNewKeyFrames是否非空==
ProcessNewKeyFrame()
==将此帧对地图点的观测信息补充进(融入)全局图,再将此帧作为节点插入共视图和全局地图==
- 计算此关键帧帧的BOW词袋向量
- 获取全局图中被此关键帧观测到的地图点
vpMapPointMatches- 对vpMapPointMatches中每一个地图点,更新:地图点的被观测数(+1),平均观测方向、最佳描述子等;不够确定的地图点,记录在
mlpLoopKeyFrameQueue,需进一步检查- 把帧插入共视图:寻找共视关系,更新共视图链接关系
- 把帧插入全局地图
MapPointCulling()
==遍历mlpLoopKeyFrameQueue 中地图点P,删除其中质量不好的点==
- P为坏点,直接删除
,删除P - 当前关键帧ID - 创建P的帧ID>2(相当于在时间空间上已经进行了一段时间)但实际观测数仍小于一个阈值
cnTHObs,删除P
CreateNewMapPoints() ==将关键帧中的特征点三角化,创建新MapPoint==
- 拿到Tracking审核得到的关键帧
后,获取共视程度最高的帧作为相邻关键帧 - 遍历相邻共视关键帧,分别与
进行特征匹配和三角化,生成地图点 - 生成的地图点记录在
mlpLoopKeyFrameQueue,还需进一步检查
SearchInNeighbors() ==将所有新的MapPoint融入全局map中,并建立与其他帧的联系== ==将当前关键帧融入全局map中,建立与其他地图点的联系==
- 获取此关键帧在共视图中的一级、二级相邻关键帧,并存放在队列
vpTargetKFs中- 正向投影融合,将
观测到的MapPoint投影至 vpTargetKFs中的关键帧,与其中的特征点建立匹配关系- 获取一、二级相邻关键帧观测到的MapPoint集合,并存放在
vpFuseCandidates中- 反向投影融合,将
vpFuseCandidates中的MapPoint投影到,与 中的特征点建立匹配关系 - 经过以上步骤,新建了许多共视关系,所以还需更新共视图中
的邻居
KeyFrameCulling() ==删除冗余关键帧==
- 获取此关键帧在共视图中的一级相邻关键帧,并存放在队列
vpLocalKeyFrames中- 遍历
vpLocalKeyFrames,获取每一共视关键帧vit所观测到的地图点pMP,存放在队列vpMapPoints中- 遍历
vpMapPoints中每一个地图点pMP,根据pMP->GetObservations()遍历所有能观测到pMP的关键帧mit- 此时,
mit、vit都观测到pMP,如果mit对应的关键帧尺度比较小,说明mit对应的关键帧要比vit对应的关键帧更靠近金字塔底部,则mit对pMP观测的效果更好- 如果
pMP被超过3个mit更好地观测,则将冗余点数目nRedundantObservations+1- 遍历完每个
vit和其对应的每个mit后,统计,如果 >90% ,删除关键帧
MapPoint::GetObservations() ==获得所有能观测到MapPoint 的关键帧集合==
InsertKeyFrame(mpCurrentKeyFrame) ==将某一帧放入回环检测处理队列==
# LoopClosing流程
函数主题
while (1)
{
// 检查缓冲队列中是否有关键帧
if (CheckNewKeyFrames())
{
// 检测闭环
if (DetectLoop())
{
// 计算sim3 相似变换
if (ComputeSim3())
{
// 闭环矫正
CorrectLoop();
}
}
}
GetVectorCovisibleKeyFrames()
==获得该帧的共视帧(已按权值排序)==
DetectLoopCandidates()
==找出初步闭环候选关键帧==
- 遍历当前关键帧的所有单词,找到这些单词的所有关键帧(不包含与当前帧相连的关键帧),作为候选关键帧,放入集合lKFsSharingWords中,并记录候选关键帧与当前帧的共同单词数mnLoopWords;
- 从lKFsSharingWords取出关键帧,确定最小公共单词数为最大公共单词数目的0.8倍,并且与当前帧的相似度得分要大于阈值minScore,符合要求的候选关键帧放入集合lScoreAndMatch;
- 从lScoreAndMatch中取出关键帧
, 与其前10的共视帧组成一个组,计算这个组的最高得分和累计得分,只留下最高累计得分的0.75倍的组,将留下的组里最高得分的关键帧放入到vpLoopCandidates返回。
SearchByBoW()
==通过词袋向量进行特征匹配==
- 遍历两个关键帧Bow的所有相同node的特征点,通过描述子距离进行匹配;
- 通过距离、比例阈值和角度直方图投票剔除错误匹配。
这里之后可能会算出一个Sim3变换,地图点发生了变化。
SearchBySim3()
==通过Sim3变换相互投影特征匹配==
- 首先计算一些必要的矩阵,进行位姿变换,投影;
- 将关键帧
的特征点投影到 ,在一个半径范围内就算特征匹配成功; - 同理,将关键帧
的特征点投影到 ; - 保留两次匹配都出现的匹配。
这里之后会对Sim3变换进行优化。
SearchByProjection()
==投影一次,查找特征匹配,范围比较大==
- 跳过**SearchBySim3()**的匹配,遍历闭环
及其共视 的所有地图点,投影到当前 ; - 搜索半径10,搜索新的匹配点。
UpdateConnections()
==更新关键帧之间的共视关系==
- 获取该关键帧的地图点vpMP,遍历地图点,得到所有观测到该地图点的关键帧observations,并记录关键帧共视的地图点个数,关键帧和共视点个数组成一个pair
- 对pair排序,将共视点个数大于阈值
的关键帧,建立与当前帧的共视关系。
SearchAndFuse()
==融合和替换地图点==
- 遍历待矫正的当前关键帧的相连关键帧;
- 将闭环帧组所有地图点mvpLoopMapPoints,投影到当前关键帧;
- 替换或融合闭环帧组中的地图点mvpLoopMapPoints。