
 论文随记
论文随记
# 2019 mapping and locatization
利用道路标记语义分割解决长期高精度视觉定位问题。
结合语义与几何的点云配准方法。
全球导航卫星系统(GNSS)。雷达、UWB技术虽然有高精度定位,但价格昂高。
近年目标检测,语义分割提供了很多语义信息,这可以整合到建图和定位的过程中。
通常部署环视摄像机以提高对遮挡的鲁棒性。
[17] 中提出了使用 ID 进行停车位检测的尝试,他们将 ID 视为语义数据关联,并应用视觉基准标签来辅助闭环,从而获得更高的精度。(没有充分利用车道线信息)
Road-SLAM [18] 中的工作对道路标记的点云进行分割和分类,然后使用道路标记匹配执行闭环,从而获得米级定位精度。
- 使用生成的点云,融合模块被设计来构建用于匹配的局部子图。
- 为了纠正航位推算误差累积,采用基于分割结果的闭环检测重访位置。
- 依次应用位姿图优化和点云校正以保证全局一致性。
- 在定位过程中,进行全局初始化,将当前局部坐标与地图坐标对齐。
- 为了提高匹配精度,提出了基于语义和几何信息的ICP来匹配语义点云和当前子图,并使用扩展卡尔曼滤波器(EKF)算法与航位推算融合,实现高精度定位,无漂移积累 .
# 使用标记道路建图
- 首先进行语义分割和IPM,将相机图像转换为单帧点云。
- 然后,提出了航位推算(IMU、轮速里程计)辅助的图像拼接和语义道路标记辅助的点云融合,以减少时间不同步和误分类的影响,构建准确的局部子地图。
- 为了获得全局一致的地图,设计了基于道路标记分割的闭环来检测重访区域。
- 最后,基于闭环结果,我们采用全局姿态图优化来确保所有姿态的一致性。
# 生成点云
- 这里使用多类点云,根据原始的鱼眼相机图像,进行语义分割,将道路标记分为七类。
- 创建鸟瞰图。
- 基于鸟瞰图,通过提取带有道路标记标签的像素来创建点云。
- 由于四个鱼眼相机的时间难以同步,使用IMU和轮速里程计来补偿拼接误差。
- 为了确保点云配准算法保持恒定的计算复杂度,我们随机删除一些点以限制在单帧中观察到的点数。
# 点云融合
确定数据关联,设计合适的策略融合点云。
对于给定的关联,没有找到相应匹配点的点直接添加到地图中。没有关联的按以下方式融合
自己看去。
# 回环检测
通过 FAST方向 和旋转(ORB) 描述符和语义描述符,给出闭环候选,然后通过DBoW2模块计算词袋向量,最后计算关联得分分数。
# 2020 AVP-SLAM
在停车场工厂这样的环境,使用传统的几何特征几乎不切实际,会频繁的跟踪丢失。这里提出一种语义特征,可以很稳定的识别车道线,路标等,且不受视角和光线的影响。
# 本文的主要工作:
- 提出在vslam中的语义特征。
- 提出完整的建图和定位系统。
- 构造真实的自动停车应用。
Get:
- relative localization 也叫 odometry , 一般先初始化开始的位置,然后关注当前帧的相对位姿。
- global localization 有一个固定的坐标,通常通过一个先验地图进行定位。
- 传统的特征方法一般都是利用集合特征(稀疏点、角点和稠密的平面),这里只需要估计关键点的位置,这些关键点可以进一步添加一个补充区分,例如SFIT、SURF、ORB、BRIEF描述子。一般通过
提前视觉里程计来构建视觉地图,然后在这个地图内对相机进行定位。例如ORB特征的地图,之后可以通过ORB描述子进行匹配来定位。- 基于道路特征的方法一般采用道路表面的道路标志(车道线、路边和标志等)。可以使用额外的设备(激光雷达)提前构建好精确的地图,
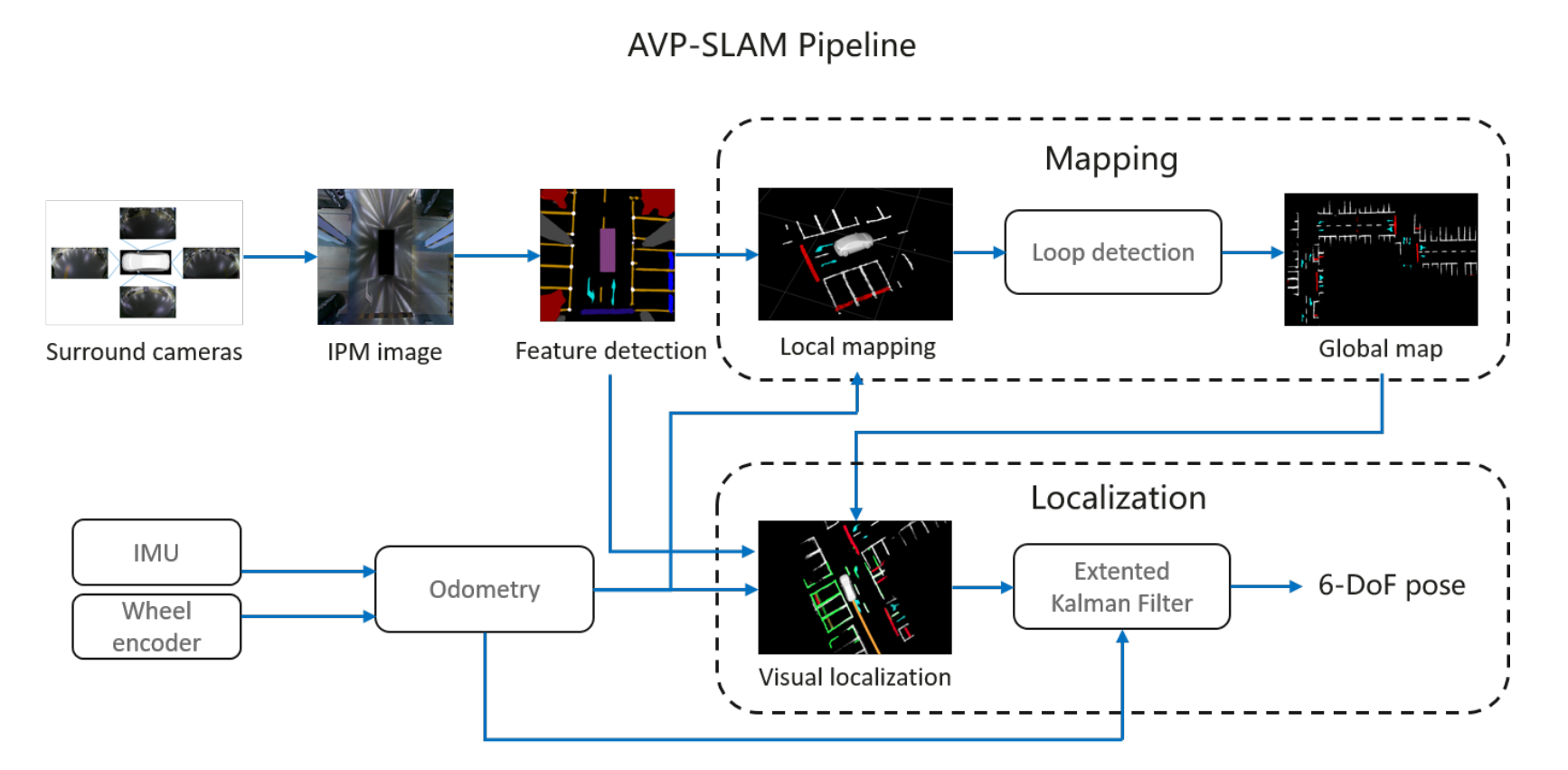
# 系统概述
- 在前后左右使用分别安装相机,使用IMU和轮速里程计提供一个初始的相对位姿,但会存在累计误差。
- 首先构建一个全局的语义地图,使用神经网络提取语义特征(车道线、指示标志、减速带),因为存在累计误差,这里采用局部地图的回环检测减少误差。
- 其次进行定位,和建图部分差不多,后端采用EKF进行优化。
# IPM Image
将相机获取照片的像素点,投影到以车为中心的坐标系中。
# Feature Detection
使用主流的CNN方法取提取语义特征。大多数图像分割网络都可以。
# Local Mapping
将上一步语义分割的点,基于里程计,转换到世界坐标系,这些点组成一个local map。
# Loop Detection
因为里程计存在累计误差,这里使用回环检测来消除漂移。对于最新的local map,我们比较它周围的local map,这里两个local map通过ICP方法来匹配。如果有两个local maps匹配成功,计算一个相对位姿,然后放到全局位姿图优化器总进行优化,进而矫正漂移。
# Global Optimization
这里的位姿图中,节点是每一个local map的位姿,这里有两种边,一种是通过里程计测量两个local maps的相对位姿,另一种是回环检测边,约束形成闭环的local maps。
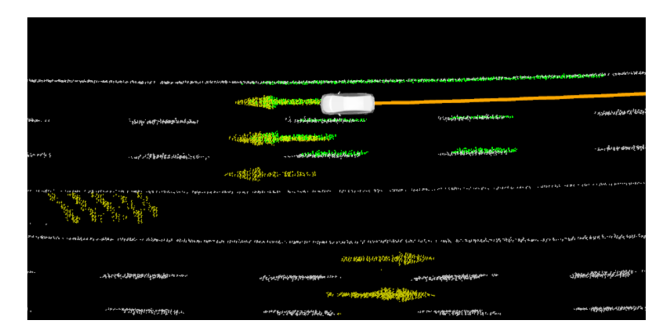
# Localization
基于已经构建好的语义地图,在车经过同样地方时可以定位。对于输入的合成图像,进行语义特征检测,转换到车的坐标系,然后通过在地图中匹配车当前获取的语义特征来估计车当前的位姿,这了使用ICP方法进行匹配
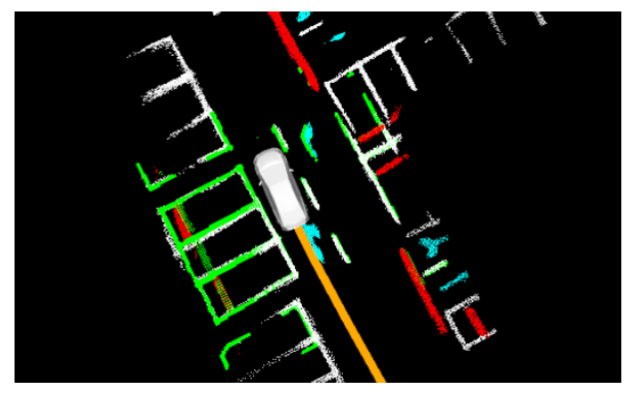
绿色的是车当前获取的特征,橙色的估计的轨迹。
ICP方法的初始迭代值很重要,在最开始的初始化中,这里提供了两种方法,一是在停车场入口处放置标志,二是进入地下停车场前使用GPS给定在地图中的初始位置。在很少纹理的区域中,采用EKF,融合了里程计和视觉定位的结果,在过滤器中,里程计作为预测,视觉定位结果用来更新。
# Parking Spot Detection
停车位的角点用来预测停车线位置,如果停车线能够匹配角点,那么这次预测是准确的。
# 2021 RoadMap
车载测绘、云端维护、用户端定位的框架。在车辆上收集和预处理地图数据,将复杂的数据上传到云端,在云端整合多辆车的数据,并及时更新语义地图,最后经过压缩,分发到车辆中。提出一个新颖的想法,使用传感器丰富的车每天去收集数据和更新地图,最终受益于量产车上。
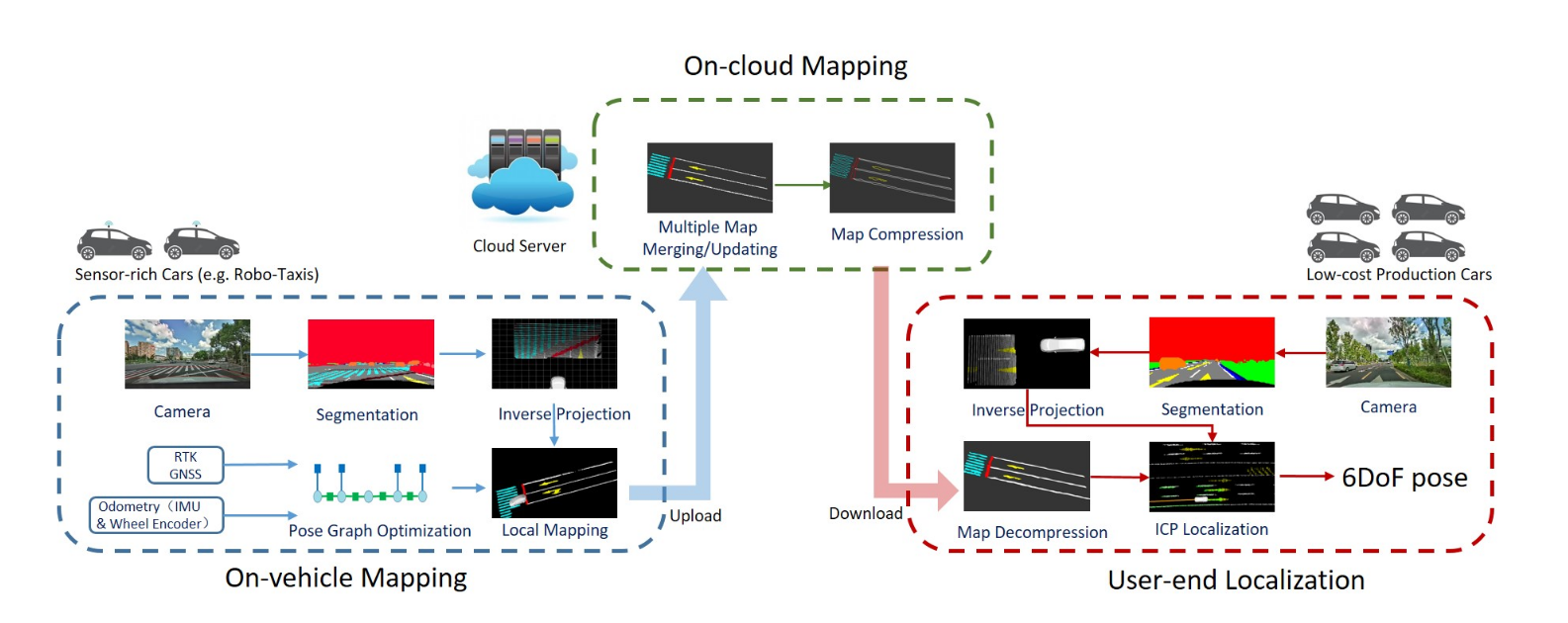
# 系统概述
- 搭载前置摄像头,GPS,IMU和轮速里程计的车每天出去收集数据,前置摄像头收集的照片放到分割网络,提取语义特征,然后将语义特征转到到世界坐标系,最后建立局部地图,上传到云端。
- 云端收集到多辆上述的车的局部地图,融合成全局地图,然后对地图轮廓提取,最后将压缩后的语义地图发送给用户(量产车)。
- 用户端配备低成本传感器,下载云端的地图,然后进行定位。
# IPM
这里只对ROI的IPM,车前方12m * 8m。
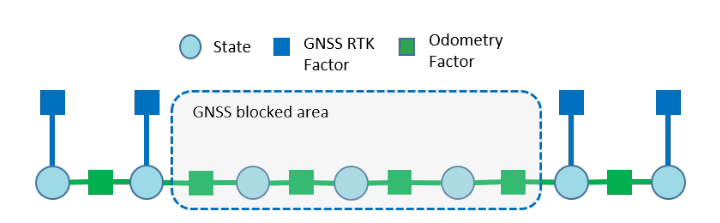
# Pose Graph Optimization
虽然用上RTK-GNSS,厘米级精度,只能在空旷的区域。这里的位姿图优化也是有两种边,GNSS RTK对节点的约束,里程计对节点的约束。
# Local Map
同理,这里的语义特征都需要投影到全局坐标系中。这里语义特征分类用了窗口,当车移动时,一个区域可能会被观测多次,由于存在分割的噪声,这区域可能会被分为不同的类别。 使用统计过滤噪声。地图被分成许多的网络,当一个语义点进入一个网格,对应的语义标签加1,次数最多的语义代表这个网格。
# Map Merging / Updating
为了节省带宽,这里只选择局部地图中被标记的网络进行上传到云端,同理云端的地图也分为若干个网格,局部地图网格中的标签得分也加到全局地图中。这个过程是并行的。
# Map Compression
同样为了节省带宽,这里语义地图的可以被轮廓代表。首先,生成语义图的顶视图图像,每一个像素代表一个网格。其次,提取每一组语义的轮廓。最后,轮廓点存起来,发送到量产车。
# Map Decompression
量产车拿到压缩后的数据后,进行解压:用相同标签的点,填充轮廓。
# ICP Localization
恢复出语义地图后,同上一篇,使用ICP方法进行匹配,后端使用EKF融合里程计和视觉定位的信息,进行优化。
绿色的车当前获取到的语义特征。
实验中,还将语义地图与谷歌地图对齐。