
 factor
factor
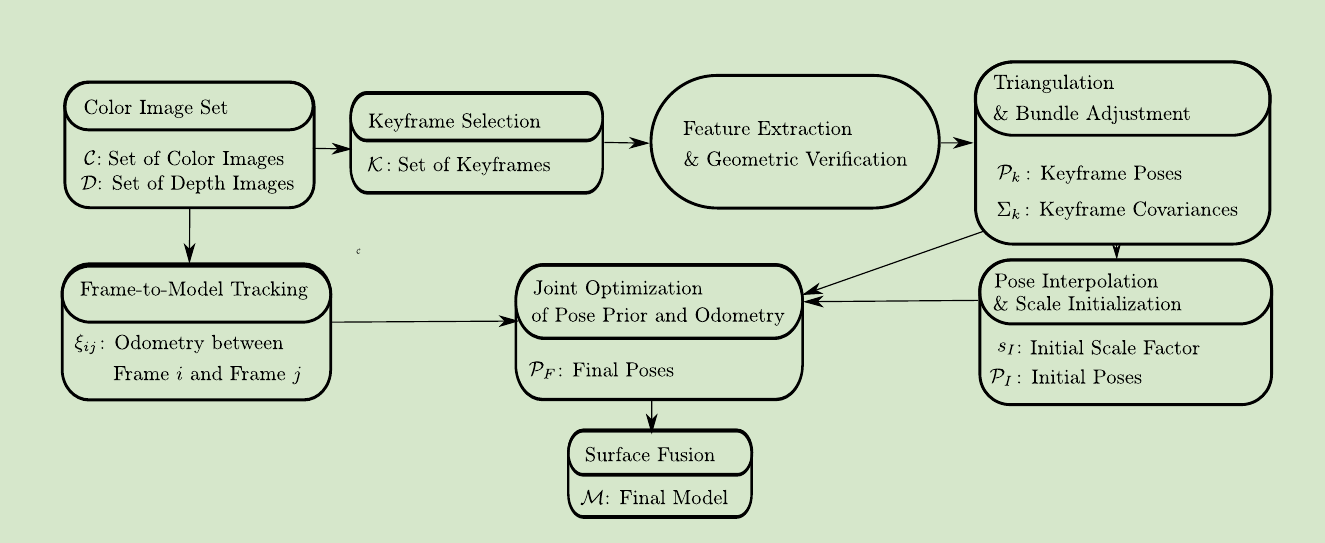
概述:该系统的输入是,一系列RGB-D图像,关键帧的初始位姿(通过SFM系统获得),通过插值关键帧,得到所有关键帧的初始位姿,然后相机位姿通过联合优化初始位姿和里程计位姿(ElasticFusion稠密跟踪获得),优化后的位姿用来最后的surfel重建。
# Prior and Odometry Estimation
估计关键帧位姿:对输入的RGB图,每隔
估计里程计位姿:使用ElasticFusion来估计帧i,j之间的相对位姿。
# Factor Graph Representation
这里是系统的核心,采用作者提出的因子图公式,联合优化关键帧的初始位姿和里程计位姿。
# Pose Initialization: Interpolation on SE(3) Manifold
使用[25]来初始化两个关键帧之间的位姿。首先计算两个关键帧位姿的差值,然后映射到se(3)上
# Scale Initialization
由于SFM估计的位姿有尺度不确定性,所以需要找到一个尺度因子去对齐这两组位姿。对于一组已知的全局坐标的3D路标点
# Optimization and Surfel-based Model Reconstruction
当获得新的里程计位姿,将其插入到因子图中,使用iSAM2进行增量优化[27]。通过全局一致的先验位姿约束里程计位姿。